
Принцип действия
Сущность инерциальной навигации состоит в определении ускорения объекта и его угловых скоростей с помощью установленных на движущемся объекте приборов и устройств, а по этим данным — местоположения (координат) этого объекта, его курса, скорости, пройденного пути и др., а также в определении параметров, необходимых для стабилизации объекта и автоматического управления его движением. Это осуществляется с помощью:
- датчиков линейного ускорения (акселерометров);
- гироскопических устройств, воспроизводящих на объекте систему отсчёта (например, с помощью гиростабилизированной платформы) и позволяющих определять углы поворота и наклона объекта, используемые для его стабилизации и управления движением.
- вычислительных устройств (ЭВМ), которые по ускорениям (путём их интегрирования) находят скорость объекта, его координаты и др. параметры движения;
Преимущества методов инерциальной навигации состоят в автономности, помехозащищённости и возможности полной автоматизации всех процессов навигации. Благодаря этому методы инерциальной навигации получают всё более широкое применение при решении проблем навигации надводных, подводных и воздушных судов, космических судов и аппаратов и других движущихся объектов.
Инерциальная навигация также используется в военных целях: в крылатых ракетах и БПЛА, в случае радиоэлектронного противодействия противника. Как только система навигации крылатой ракеты или БПЛА обнаруживает воздействие средств РЭБ противника, блокировку или искажение сигнала GPS, она запоминает последние координаты и переключается на инерциальную систему навигации.
Links
- Espacenet
- Discuss
-
238000005259
measurement
Methods0.000
claims
abstract
description
23
-
239000000969
carrier
Substances0.000
claims
abstract
description
8
-
241001442055
Vipera berus
Species0.000
claims
description
5
-
238000006243
chemical reaction
Methods0.000
claims
description
3
-
230000015572
biosynthetic process
Effects0.000
abstract
description
10
-
238000005755
formation reaction
Methods0.000
abstract
description
10
-
230000036039
immunity
Effects0.000
abstract
description
8
-
239000000126
substance
Substances0.000
abstract
1
-
230000001133
acceleration
Effects0.000
description
15
-
239000000463
material
Substances0.000
description
8
-
239000011159
matrix material
Substances0.000
description
7
-
230000000875
corresponding
Effects0.000
description
6
-
238000004088
simulation
Methods0.000
description
6
-
238000006073
displacement reaction
Methods0.000
description
4
-
239000000203
mixture
Substances0.000
description
4
-
210000004279
Orbit
Anatomy0.000
description
3
-
238000004422
calculation algorithm
Methods0.000
description
3
-
238000004364
calculation method
Methods0.000
description
3
-
238000010276
construction
Methods0.000
description
3
-
230000014509
gene expression
Effects0.000
description
3
-
230000005653
Brownian motion process
Effects0.000
description
2
-
238000004458
analytical method
Methods0.000
description
2
-
238000010586
diagram
Methods0.000
description
2
-
238000001914
filtration
Methods0.000
description
2
-
230000005484
gravity
Effects0.000
description
2
-
238000000034
method
Methods0.000
description
2
-
229910052904
quartz
Inorganic materials0.000
description
2
-
239000010453
quartz
Substances0.000
description
2
-
VYPSYNLAJGMNEJ-UHFFFAOYSA-N
silicon dioxide
Inorganic materialsO==O
VYPSYNLAJGMNEJ-UHFFFAOYSA-N
0.000description
2
-
238000011105
stabilization
Methods0.000
description
2
-
102100004924
CACNA1B
Human genes0.000
description
1
-
108060001066
CACNA1B
Proteins0.000
description
1
-
238000005094
computer simulation
Methods0.000
description
1
-
230000001276
controlling effect
Effects0.000
description
1
-
239000006185
dispersion
Substances0.000
description
1
-
238000005265
energy consumption
Methods0.000
description
1
-
238000009472
formulation
Methods0.000
description
1
-
238000009434
installation
Methods0.000
description
1
-
230000000737
periodic
Effects0.000
description
1
-
230000003595
spectral
Effects0.000
description
1
-
230000001360
synchronised
Effects0.000
description
1
Оборудование Galileosky
Основные продукты компании – трекеры, терминалы контроля транспорта и программы для приборов. У продукции ГалилеоСкай есть несколько особенностей:
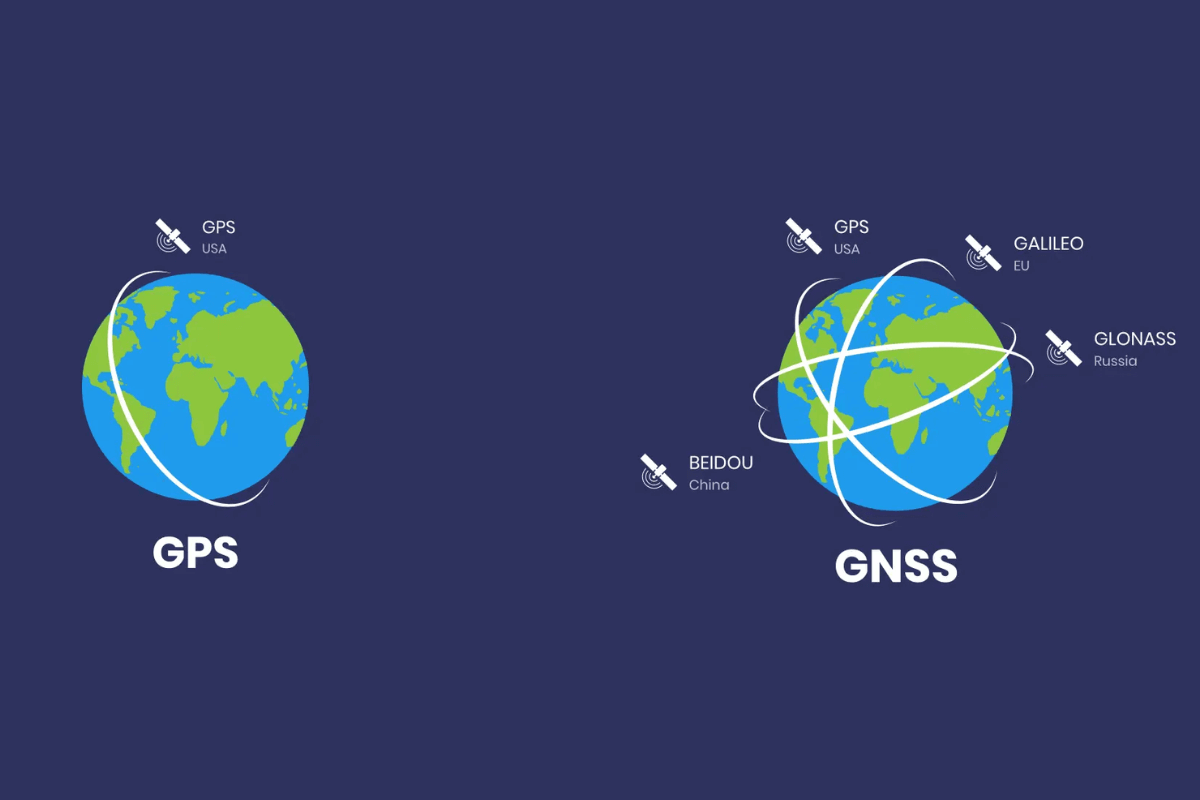
- Поддержка двух систем. Все приборы поддерживают и ГЛОНАСС, и GPS.
- Расширенный функционал. По сравнению с устройствами схожей стоимости аппараты ГалилеоСкай выделяются широким диапазоном задач, которые они решают.
- Средний ценовой уровень. Практически все модели можно купить за сумму до 12 000 рублей.
 GALILEOSKY ГЛОНАСС/GPS v 5.0
GALILEOSKY ГЛОНАСС/GPS v 5.0
Комплектация
В комплект терминала, помимо самого устройства, входят следующие элементы:
- соединительный разъем с контактами;
- предохранитель;
- комплект шнуров;
- СИМ-холдер;
- держатель;
- антенны.
Технические и физические характеристики
У приборов есть всего две физические характеристики:
- Габариты. Как правило, не превышают 8х7х3 см.
- Вес около 400 г.
К техническим характеристикам устройства относятся следующие показатели:
- Время холодного старта, то есть первого подключения прибора. Доходит до 30 минут.
- Количество входов и выходов. Максимальное число – 16.
- Поддержка модуля Bluetooth.
- Время горячего старта, то есть повторного включения прибора. Как правило, не более 1 минуты.
- Число подключенных датчиков – до 16.
- Модель GSM-модема.
- Максимальная погрешность – не превышает 5 метров.
- Материал корпуса – металл или пластик.
- Срок службы батареи. Ограничен или временем, или циклами заряда/разряда.
- Количество слотов для СИМ-карт. Больше двух карт в терминал не вставляют из-за нерациональности такого использования аппарата.
- Гарантийный срок и срок службы. Первый, как правило, вдвое короче, чем второй.
- Диапазон рабочих температур. Для большинства устройств это показатель от –40 ℃ до +85 ℃.
Правила эксплуатации
Существует несколько общих правил безопасной работы:
- запрещено питание аппарата от бортовой сети, устройство подключается к аккумулятору машины;
- перед работой требуется тщательное изучение инструкции пользователя;
- монтаж устройства проводят в специальных центрах;
- при подключении прибора к питанию соблюдают полярность;
- неиспользуемые контакты изолируют;
- при выходе устройства из строя нужно обратиться в сервисный центр ГалилеоСкай.
Подключение
Инструкция подключения отлична от одной модели к другой. Общие рекомендации по установке элементов системы приведены ниже.
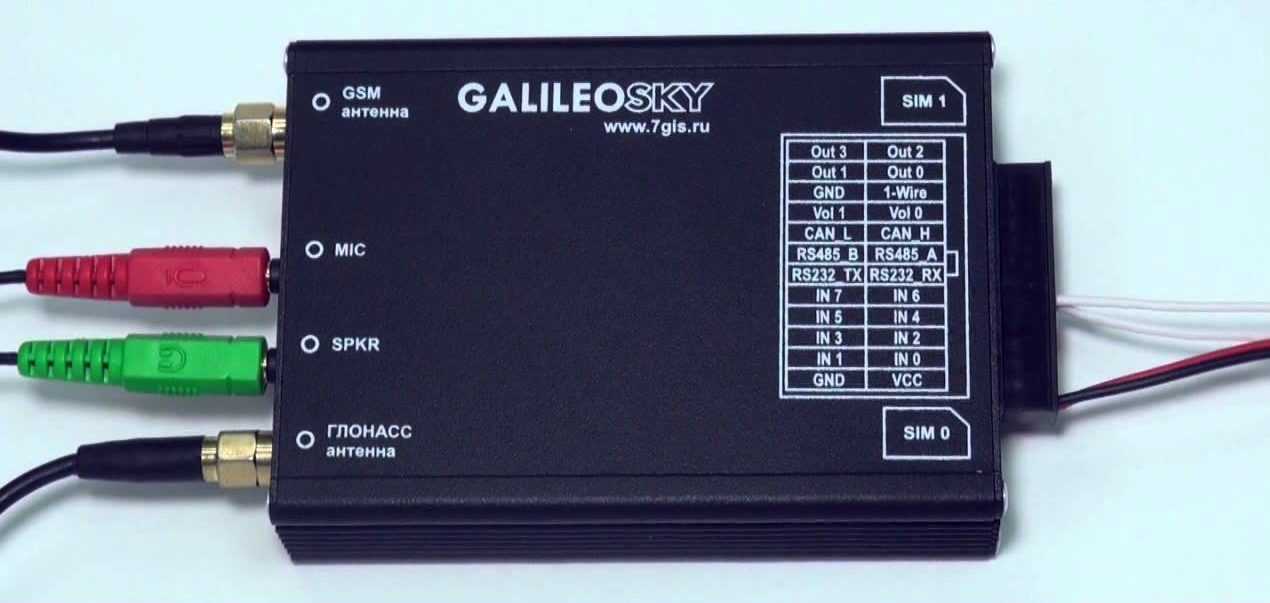 Терминал GalileoSky v5.0
Терминал GalileoSky v5.0
Антенны
Алгоритм установки антенны следующий:
- Прикрутить деталь к терминалу так, чтобы другой ее конец смотрел в небо. Рекомендуемое место установки – лобовое стекло или крыша машины.
- Проверить координаты в системе. Если подключение проведено успешно, то информация о местонахождении устройства появится в системе в течение 3 минут.
Внешней периферии
К данному разделу относятся, прежде всего, датчики диагностики автомобиля. С помощью этих устройств система получает следующую информацию:
- температура охлаждающей жидкости;
- расход топлива;
- уровень горючего в баке;
- обороты двигателя;
- нагрузка на оси;
- пробег.
Как правило, датчики подсоединяются напрямую к терминалу, через входные разъемы. Далее прибор настраивается через программу «Конфигуратор».
Установка и запуск конфигуратора
Настройка всех устройств проводится через авторскую программу-конфигуратор. Последнюю версию дистрибутива можно скачать на официальном сайте компании. Внутри папки находится драйвер, конфигуратор и документация. Помимо компьютерной установки, ПО доступно для гаджетов с системой Андроид.
Главное преимущество «Конфигуратора» в его интуитивном интерфейсе. К такой программе не нужна инструкция. После того как ПО запустится, начинается настройка работы терминалов.
Список команд
Приборы Galileosky используют СМС-команды для удаленного управления прибором. Полный их список обозначен в руководстве пользователя и занимает не одну страницу. Как правило, Galileosky команды представляют собой буквенно-цифровые коды.
При помощи этого инструмента можно задать максимальный угол наклона и режим работы внутри выбранной геозоны, узнать температуру и влажность с внешних датчиков, позвонить с терминала на телефон. Полный список функций обозначен в руководстве пользователя.
Координаты и параметры
Ранее в структурах «Ростеха» создавались инерциальные комплексы автономной навигации на бесплатформенной основе. Такие аппараты осуществляют общую географическую ориентировку и определяют местонахождение носителя относительно заданной траектории или окружающих объектов.
«Инерциальные навигационные системы — отнюдь не новое изобретение, но они не уходят в прошлое и продолжают достаточно интенсивно совершенствоваться, прежде всего в плане улучшения точности. В авиации инерциальные системы ценят главным образом за полную автономность и помехозащищённость», — говорит Дмитрий Корнев.




Также по теме

Будущее авиации: как могут взаимодействовать истребитель Су-57 и ударный беспилотник С-70 «Охотник»
Группа истребителей пятого поколения Су-57 приняла участие в репетиции воздушной части парада на Красной площади. Объединённая…
Принцип работы ИНС заключается в измерении ускорений летательного аппарата и его угловых скоростей относительно трёх осей. По этим данным система определяет местоположение воздушного судна, его скорость, курс и другие параметры. Эти данные позволяют стабилизировать положение аппарата во время полёта и применить автоматическое управление.
«ИНС могут решать различные задачи. Это и общая географическая ориентировка, и определение местонахождения относительно заданной траектории или цели, и наведение на движущуюся цель», — поясняется в материалах «Ростеха».
Основными элементами инерциальной системы являются гироскопы и акселерометры. Первый тип приборов определяет углы наклона летательного аппарата относительно основных осей (тангаж, рысканье и крен), второй считывает линейное ускорение.
Точность полученной информации зависит от характеристик гироскопов и акселерометров. Анализом данных занимается компьютер. После их обработки он корректирует движение воздушного судна согласно заложенным навигационным алгоритмам.
В бесплатформенных ИНС, которые считаются более перспективными, акселерометры и гироскопы жёстко связаны с корпусом прибора, а функции платформы моделируются математически вычислительной системой.
Преимущество таких инерциальных систем заключается в меньшей массе и габаритах по сравнению с платформенными аппаратами. Также они более устойчивы к перегрузкам.

- БПЛА российской армии
- РИА Новости
В прошлом году холдинг АО «КРЭТ» (АО «Концерн «Радиоэлектронные технологии») поставил одному из заказчиков новую линейку бесплатформенных автономных навигационных систем. Приборы были разработаны на основе аналогичного оборудования для пилотируемых воздушных судов.
Новые ИНС способны с высокой точностью определять координаты и параметры движения объектов, не имея средств спутниковой связи, наземных и морских ориентиров. Погрешность их работы составляет менее 2% (у спутниковых систем — менее 1%).
«Основанные на колоссальном опыте создания бортового оборудования для самолётов и вертолётов, эти системы отличаются надёжностью, высочайшей точностью и универсальностью. Они позволяют беспилотнику не зависеть от наземных ориентиров и погодных условий», — пояснил в прошлом году исполнительный директор «Ростеха» Олег Евтушенко.
Характеристики МИНМ
| Наименование | ТСКЯ.468389.007 / ТСКЯ.468389.007-01 |
| МЭМС датчик угловых скоростей, шт | 12 / 3 |
| МЭМС датчик акселерометр, шт | 6 |
| МЭМС датчик давления (высотомер), шт | 1 |
| МЭМС датчик трехосевого магнитометра, шт | 1 |
| Запись телеметрии (чёрный ящик) | Есть |
| Режим курсовертикали | Есть |
| Режим БИНС | Есть |
| Время определения угла курса | 5 …10 секунд |
| Диапазон измеряемых угловых скоростей, по каждой из 3-х осей | ± 450 гр/с |
| Диапазон измеряемых кажущихся линейных ускорений, по каждой из 3-х осей | ± 100 м/с2 (± 10 g ) |
| Диапазон измеряемого атмосферного давления | 30….110 кПа |
| Диапазоны счисляемых углов Эйлера-Крылова, курс, крен и тангаж, соответственно | ± 180˚, ±180˚, ± 90˚ |
| Ошибка (1 СКО) тангажа и крена с коррекцией по акселерометру | 0.25 ° |
| Ошибка (1 СКО) курса с коррекцией по магнитометру | 1° |
| Интерфейсы для взаимодействия с внешними устройствами | SPI и UART (по требованию заказчика могут быть добавлены CAN, RS232\422 или МКИО ГОСТ Р 52070-2003) |
| Напряжение питание модуля | 3,3 В |
| Потребление | 1,6 Вт / менее 1,6 Вт |
| Габаритные размеры | 45х55х16,5 мм |
| Диапазоны измерения магнитного поля | ± 2,5 Гаусс |
| Герметичность | IP20 |
| Рабочий диапазон температур | -50 … + 70˚С |
| ГНСС приемник | отсутствует, есть возможность непосредственного подключения по UART приемника по протоколу NMEA |
| Нахождение курса в статике | есть, определяется по данным магнитометра (компаса) |
Особенности технологии Easy Logic
Чтобы разобраться с особенностями технологии, нужно узнать, как работает система.
Обычно при приобретении комплекта оборудования для мониторинга транспорта покупатель заранее определяется с требуемым ему функционалом системы и ищет оснащение, обладающее нужными ему характеристиками. Например, заказчик нуждается в следующих функциях:
- при нажатии тревожной кнопки камера делает фото;
- если ремень не пристегнут, звучит предупреждение;
- при остановке определяется точка положения транспортного средства.
Покупатель нашел оборудование и установил нужные функции вместе с разработчиком. Через несколько месяцев использования хозяин автопарка решил, что ему не хватает следующих опций:
- предупреждения при движении с выключенными фарами;
- оповещения о попытке взлома терминала.
Чтобы внедрить эти функции в уже работающую систему, заказчику придется связываться с разработчиком, ждать внесения корректировок, тестировать правки – весь процесс растягивается на несколько недель.
С технологией Easy Logic заказчик может сам запрограммировать индивидуальные алгоритмы действий системы и менять их. Для этого достаточно зайти в программу «Конфигуратор» и перейти во вкладку «Программирование». На рабочем поле алгоритмы прописываются в виде блок-схем, поэтому для настройки алгоритмов не нужны особые знания.
Таким образом, Easy Logic позволяет расширить функционал системы и дает больше возможностей пользователям.
ТОП-10 популярных устройств
В десятку наиболее часто используемых приборов компании входят следующие модели:
-
Galileosky OBD-II. Самый маленький трекер на рынке габаритами всего 5х5х2,5 см. Отличается своей функциональностью – помимо навигации, устройство отображает диагностическую информацию автомобиля – скорость, температуру охлаждающей жидкости, обороты и прочее. Еще одна особенность galileosky obd2 – максимальная простота монтажа. У аппарата совсем нет проводов, а установка занимает меньше минуты и не требует консультации специалистов.
- Galileosky Base Block lite. Относится к новому поколению приборов. Отличается низким уровнем энергопотребления, многозадачностью и возможностью подключения дополнительных устройств – у аппарата 6 разъемов. Оснащен металлическим корпусом. Устройство можно отключить от внешнего питания.
- Galileosky 7.0 Lite. При небольших размерах прибор полностью помещается на ладони. Устройство решает практически все задачи мониторинга транспорта. Относится к бюджетным терминалам, но обладает более широким диапазоном задач, чем аппараты других компаний того же ценового ряда.
-
Base Block Iridium. Относится к приборам класса премиум. Поддерживает связь даже при отсутствии сети. Оснащен слотом для карты памяти до 256 Гб. Единственный недостаток – цена, превышающая среднюю стоимость устройства в четыре раза.
-
Galileosky v. 5.0. Оснащен двумя слотами для СИМ-карт. Поддерживает Стелс-режим (выход на связь по расписанию).
- Base Block Optimum. Представляет собой мощный компьютер. Имеет функцию расширения памяти до 32 Гб.
- Galileosky 7.0 Wi-Fi. Отличается возможностью передачи информации по сети Wi-Fi.
- Base Block Wi-Fi Hub. У этого прибора есть особая функция – он создан для работы в местах, где нет покрытия сотовой связи. Наиболее часто используется в лесозаготовительной и горнодобывающей промышленностях.
- Galileosky 7x C. 10 входов и 4 выхода прибора позволяют подключить максимальное количество периферических аппаратов.
-
Galileosky 7x Plus. Устройство оснащено восьмью входами и четырьмя выходами. Возможно расширение памяти до 512 Гб.
Похожие патенты RU2462690C1
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ ГИРОСКОПИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ МОРСКИХ ОБЪЕКТОВ | 2008 |
|
RU2428659C2 |
Инерциальные навигационные системы
Инерциальная навигационная система БР S3 (Франция).
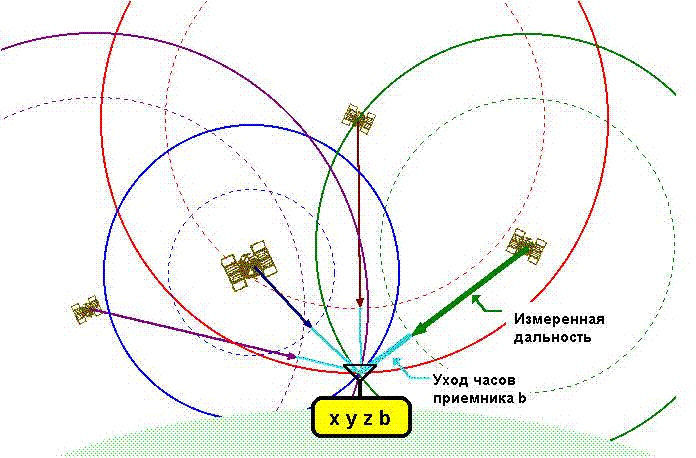
Инерциальные навигационные системы (ИНС) имеют в своём составе датчики линейного ускорения (акселерометры) и угловой скорости (гироскопы или пары акселерометров, измеряющих центробежное ускорение). С их помощью можно определить отклонение связанной с корпусом прибора системы координат от системы координат, связанной с Землёй, получив углы ориентации: рыскание (курс), тангаж и крен. Угловое отклонение координат в виде широты, долготы и высоты определяется путём интегрирования показаний акселерометров. Алгоритмически ИНС состоит из курсовертикали и системы определения координат. Курсовертикаль обеспечивает возможность определения ориентации в географической системе координат, что позволяет правильно определить положение объекта. При этом в неё постоянно должны поступать данные о положении объекта.
Однако технически система, как правило, не разделяется и акселерометры, например, могут использоваться при выставке курсовертикальной части.







Инерциальные навигационные системы делятся на имеющие гиростабилизированную платформу платформенные (ПИНС) и бесплатформенные (БИНС).
В платформенных ИНС взаимосвязь блока измерителей ускорений и гироскопических устройств, обеспечивающих ориентацию акселерометров в пространстве, определяет тип инерциальной системы. Известны три основных типа платформенных инерциальных систем.
- Инерциальная система геометрического типа имеет две платформы. Одна платформа с гироскопами ориентирована и стабилизирована в инерциальном пространстве, а вторая с акселерометрами — относительно плоскости горизонта. Координаты объекта определяются в вычислителе с использованием данных о взаимном расположении платформ. Обладает высокой точностью позиционирования относительно поверхности планеты (например Земли), но неудовлетворительно работает на высокоманевренных аппаратах и в космическом пространстве. Применяется, в основном, на самолётах с большой дальностью полёта (гражданские, военно-транспортные, стратегические бомбардировщики), подводных лодках и крупных надводных кораблях.
- В инерциальных системах аналитического типа и акселерометры, и гироскопы неподвижны в инерциальном пространстве (относительно сколь угодно далёких звёзд или галактик). Координаты объекта получаются в вычислителе, обрабатывающем сигналы, поступающие с акселерометров и устройств-определителей поворота самого объекта относительно гироскопов и акселерометров. Обладает сравнительно невысокой точностью при движении у поверхности Земли, но хорошо работает на маневренных объектах (истребители, вертолеты, ракеты, скоростные маневренные надводные суда) и в космическом пространстве.
- Полуаналитическая система имеет платформу, которая непрерывно стабилизируется по местному горизонту. На платформе имеются гироскопы и акселерометры. Координаты самолёта или иного летательного аппарата определяются в вычислителе, расположенном вне платформы.
В БИНС акселерометры и гироскопы жестко связаны с корпусом прибора.
Передовой технологией в производстве БИНС является технология волоконно-оптических гироскопов (ВОГ), принцип действия которых основан на эффекте Саньяка. БИНС на базе таких гироскопов не имеет подвижных частей, абсолютно бесшумна, механически сравнительно прочна, не требует специального обслуживания, имеет хорошие показатели наработки на отказ (до 80 тыс. часов у некоторых моделей) и малое энергопотребление (десятки ватт). Технологии ВОГ пришли на смену лазерно-кольцевым гироскопам (ЛКГ).
Описание изобретения к патенту
тт
л
и
ила
мкccиNS
NSoи. Погрешность (1) определения ФПУ станет меньше 1o при скоростях движения самолета по Земле > 30 км/час. При скорости W 100 км/час, D 0,3o, при W 200 км/час, D 9 угловых минут.
От СНС с третьего выхода в блок БВМС поступают составляющие VN, VS текущей путевой скорости самолета. В блоке БВМС вычисляется модуль W путевой скорости: величина W которой поступает далее на вход порогового блока 6. В этом блоке сравнивается текущее значение W с заложенным в блоке пороговым значением (например 30 км/час) скорости.
С момента, при котором W 30 км/час на первый вход блока ЛБ с выхода блока ПОР поступает РК «Коррекция».
При поступлении на первый вход блока 1Б РК «Коррекция», отсутствии на третьем входе РК «Подготовка» и наличии РК «Шасси обжато», на входе блока 7 формируется РК «Коррекция ИНС со СНС».
При поступлении этой РК ключ открывается, на четвертый вход ИНС поступает и=ФПУ.
При этом в ИНС корректируются начальные значения вектора навигационного состояния ИНС.
При взлете самолета снимается РК «Шасси обжато» от блока 8 ДСОШ. При этом на выходе блока 7 (ЛБ) снимается РК «Коррекция ИНС по СНС» и курс далее от СНС не корректируется, так как в воздухе и=ФПУ..
Блок 7 ЛБ работает следующим образом (см. фиг.3).
При наличии РК «Шасси обжато» на втором входе и отсутствии РК «Подготовка» на третьем входе контакты реле Р1, Р2, замкнуты и в случае поступления РК «Коррекция» на первом входе на выходе блока формируется РК «Коррекция ИНС по СНС».
При наличии РК «Подготовка» на третьем входе контакты К2 реле Р2 разомкнуты и формирование на выходе ЛБ РК «Коррекция ИНС по СНС» исключено. При отсутствии на втором входе блока РК «Шасси обжато» контакты К1 реле Р1 разомкнуты и формирование на выходе ЛБ РК «Коррекция ИНС по СНС» также исключено. При отсутствии на первом входе в блок ЛБ РК «Коррекция» на выходе блока РК «Коррекция ИНС по СНС» не будет вне зависимости от наличии или отсутствия РК «Шасси обжато», «Подготовка» на входе этого блока.
Блок 9 КЛ работает следующим образом (см. фиг.4).







Угол ФПУ от СНС, поступающий на нормально разомкнутые контакты реле Р1, пройдет на выход ключа только при наличии на 2 входе блока РК «Коррекция ИНС по СНС».
Использование в комплексной системе прототипе новых блоков: СНС, БВМС, ПОР, ЛБ, КЛ с их связями позволяет производить довыставку системы в азимуте в процессе взлета самолета с любых взлетно-посадочных полос, при этом не требуется знание курса ВПП.
Использование предлагаемого изобретения на гражданских, и военных самолетах позволяет технологично (автоматически без трудовых и временных затрат (производить с достаточной точностью довыставку ИНС в азимуте, тем самым обеспечивая выполнение того или иного полетного задания экономить горючее.
Links
- Espacenet
- Discuss
-
239000000835
fiber
Substances0.000
claims
abstract
3
-
239000000969
carrier
Substances0.000
claims
description
3
-
238000005259
measurement
Methods0.000
abstract
description
36
-
230000000875
corresponding
Effects0.000
abstract
description
6
-
230000036039
immunity
Effects0.000
abstract
description
2
-
230000000694
effects
Effects0.000
abstract
1
-
238000011156
evaluation
Methods0.000
abstract
1
-
239000000126
substance
Substances0.000
abstract
1
-
230000018109
developmental process
Effects0.000
description
9
-
238000006073
displacement reaction
Methods0.000
description
7
-
238000000034
method
Methods0.000
description
6
-
239000011159
matrix material
Substances0.000
description
3
-
240000003584
Ziziphus jujuba
Species0.000
description
2
-
230000015572
biosynthetic process
Effects0.000
description
2
-
238000010276
construction
Methods0.000
description
2
-
238000005755
formation reaction
Methods0.000
description
2
-
238000004088
simulation
Methods0.000
description
2
-
239000003643
water by type
Substances0.000
description
2
-
239000002028
Biomass
Substances0.000
description
1
-
238000004364
calculation method
Methods0.000
description
1
-
238000010586
diagram
Methods0.000
description
1
-
238000010884
ion-beam technique
Methods0.000
description
1
-
230000000051
modifying
Effects0.000
description
1
-
238000005096
rolling process
Methods0.000
description
1
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
|
RU2461040C1 * |
2011-05-13 | 2012-09-10 | Государственное образовательное учреждение высшего профессионального образования «Санкт-Петербургский государственный университет Аэрокосмического приборостроения» | Устройство для комплексного контроля датчиков подвижного объекта |
|
RU2462690C1 * |
2011-05-13 | 2012-09-27 | Открытое акционерное общество «Концерн «Центральный научно-исследовательский институт «Электроприбор» | Интегрированная инерциально-спутниковая система ориентации и навигации |
|
RU2544785C2 * |
2012-01-11 | 2015-03-20 | Йена-Оптроник Гмбх | Способ повышения надежности сенсорных систем |
|
US9593951B2 |
2012-01-11 | 2017-03-14 | Jena-Optronik Gmbh | Method for increasing the reliability of sensor systems |
|
RU2492499C1 * |
2012-03-01 | 2013-09-10 | Открытое акционерное общество «Российская корпорация ракетно-космического приборостроения и информационных систем» (ОАО «Российские космические системы») | Способ определения местоположения объекта при использовании глобальных навигационных спутниковых систем и система для его реализации |
|
RU2519603C2 * |
2012-06-28 | 2014-06-20 | Федеральное государственное унитарное предприятие «Московское опытно-конструкторское бюро «Марс» (ФГУП МОКБ «Марс») | Способ измерения вектора угловой скорости космического аппарата и устройство для его реализации |
|
RU2565345C2 * |
2014-02-07 | 2015-10-20 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Московский государственный технический университет имени Н.Э. Баумана» | Навигационный комплекс |
|
RU2561003C1 * |
2014-05-14 | 2015-08-20 | Российская Федерация, От Имени Которой Выступает Министерство Промышленности И Торговли Российской Федерации | Интегрированная система ориентации и навигации для объектов с быстрым вращением вокруг продольной оси |
|
RU2677099C1 * |
2017-12-18 | 2019-01-15 | Акционерное общество «Концерн «Центральный научно-исследовательский институт «Электроприбор» | Способ калибровки погрешностей бескарданной инерциальной системы на электростатических гироскопах в условиях орбитального полета |
|
RU2678959C1 * |
2018-02-14 | 2019-02-04 | Акционерное общество «Концерн «Центральный научно-исследовательский институт «Электроприбор» | Способ калибровки погрешностей электростатических гироскопов бескарданной инерциальной системы ориентации в условиях орбитального космического аппарата |
|
RU2789116C1 * |
2021-11-19 | 2023-01-30 | Публичное акционерное общество Арзамасское научно-производственное предприятие «ТЕМП-АВИА» | Устройство для управления двигателем и коррекции дрейфа гироскопа |
Info
- Publication number
- RU2380656C1
RU2380656C1
RU2008150960/28A
RU2008150960A
RU2380656C1
RU 2380656 C1
RU2380656 C1
RU 2380656C1
RU 2008150960/28 A
RU2008150960/28 A
RU 2008150960/28A
RU 2008150960 A
RU2008150960 A
RU 2008150960A
RU 2380656 C1
RU2380656 C1
RU 2380656C1
Authority
RU
Russia
Prior art keywords
block
output
unit
input
outputs
Prior art date
2008-12-24
Application number
RU2008150960/28A
Other languages
English (en)
Inventor
Олег Степанович Салычев (RU)
Олег Степанович Салычев
Original Assignee
Олег Степанович Салычев
Priority date (The priority date is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the date listed.)
2008-12-24
Filing date
2008-12-24
Publication date
2010-01-27
2008-12-24Application filed by Олег Степанович Салычев
filed
Critical
Олег Степанович Салычев
2008-12-24Priority to RU2008150960/28A
priority
Critical
patent/RU2380656C1/ru
2010-01-27Application granted
granted
Critical
2010-01-27Publication of RU2380656C1
publication
Critical
patent/RU2380656C1/ru
Links
- Espacenet
- Discuss
-
230000001133
acceleration
Effects0.000
claims
abstract
description
52
-
239000000969
carrier
Substances0.000
claims
abstract
description
26
-
230000000875
corresponding
Effects0.000
claims
description
61
-
239000011159
matrix material
Substances0.000
claims
description
39
-
238000004364
calculation method
Methods0.000
claims
description
24
-
238000006243
chemical reaction
Methods0.000
claims
description
14
-
230000003044
adaptive
Effects0.000
claims
description
11
-
238000005259
measurement
Methods0.000
claims
description
9
-
230000007274
generation of a signal involved in cell-cell signaling
Effects0.000
claims
description
7
-
239000000470
constituent
Substances0.000
abstract
1
-
230000000694
effects
Effects0.000
abstract
1
-
239000000126
substance
Substances0.000
abstract
1
-
238000010586
diagram
Methods0.000
description
13
-
230000010006
flight
Effects0.000
description
9
-
210000000474
Heel
Anatomy0.000
description
5
-
230000015572
biosynthetic process
Effects0.000
description
5
-
238000005755
formation reaction
Methods0.000
description
5
-
238000001914
filtration
Methods0.000
description
3
-
210000004544
DC2
Anatomy0.000
description
2
-
230000005540
biological transmission
Effects0.000
description
2
-
230000002530
ischemic preconditioning
Effects0.000
description
2
-
239000000203
mixture
Substances0.000
description
2
-
229940040608
SPS
Drugs0.000
description
1
-
238000009825
accumulation
Methods0.000
description
1
-
238000004220
aggregation
Methods0.000
description
1
-
230000002776
aggregation
Effects0.000
description
1
-
230000000536
complexating
Effects0.000
description
1
-
238000010790
dilution
Methods0.000
description
1
-
239000006185
dispersion
Substances0.000
description
1
-
238000000034
method
Methods0.000
description
1
-
238000004377
microelectronic
Methods0.000
description
1
-
238000005070
sampling
Methods0.000
description
1
-
239000007787
solid
Substances0.000
description
1
Выводы
Продукция фирмы «ГалилеоСкай» решает много задач, при этом не выходя за рамки средних ценовых показателей. Среди терминалов компании есть уникальные устройства, как, например, Galileosky OBD-II – самый маленький автомобильный трекер.
Особенность производителя – авторская программа настройки приборов «Конфигуратор». ПО совместимо с системой Андроид и обладает понятным интерфейсом.
Последняя разработка компании – технология Easy Logic – названа новым шагом в технологии программного обеспечения. Пользователь может запрограммировать приборы на определенный алгоритм действий, не прибегая к помощи профессионалов.