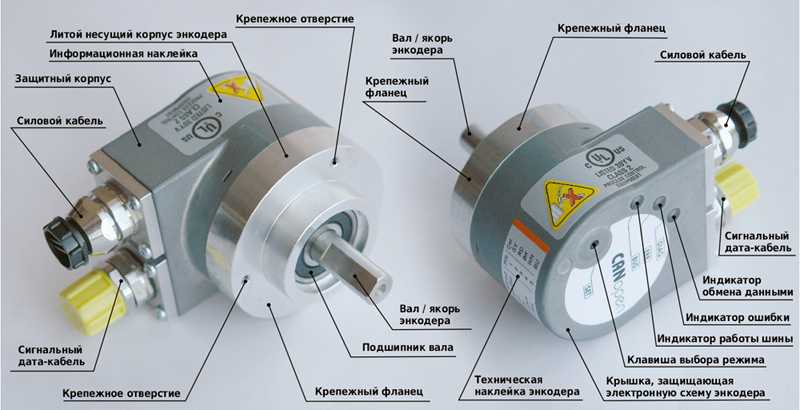
Энкодер – это… Инкрементальный энкодер
Слово «энкодер» имеет англоязычное происхождение. Оно возникло от слова encode, что значит «преобразовывать». Наиболее известными мировыми производителями данных приборов являются такие известные бренды как Siemens, СКБ ИС, HEIDENHAIN RLS, Baumer, SICK AG, Balluff, Schneider electric (Autonics Telemecanique), OMRON.
Сфера и цель применения
Энкодер – это датчик, применяемый в промышленной области с целью преобразования подконтрольной величины в электрический сигнал. При помощи него определяется, например, положение вала электрического двигателя.
В связи с тем что каждое устройство, в котором применяется вращение, обязательно должно быть оснащено прибором, контролирующим точность вращательного момента, популярными сферами использования подобных преобразователей являются системы точного перемещения. Основная цель, с которой применяется энкодер, – это измерение угла поворота объекта во время вращения.
Энкодеры незаменимы в процессе производства на станкостроительных предприятиях, в работотехнических комплексах. Используют их также во многих современных измерительных приборах, которые нуждаются в регистрации высокоточных измерений углов, вращения, поворотов и наклонов.
Ранжирование энкодеров
Все ныне известные энкодеры подразделяются на абсолютные и инкрементальные, резисторные, магнитные и оптические, работающие через промышленные сети либо шинный интерфейс.
В зависимости от общего принципа работы выделяют абсолютные энкодеры и инкрементальные. Различие между этими двумя видами заключается в выполняемых ними задачах. Перечень задач абсолютного энкодера гораздо шире перечня, который охватывается энкодером инкрементальным.
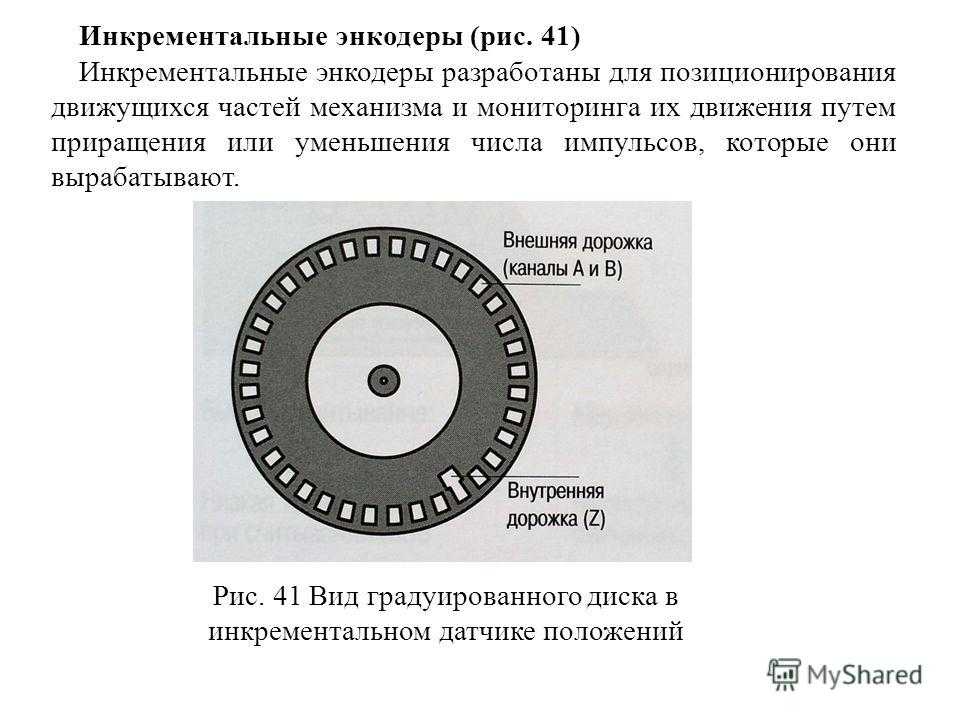
Инкрементальные энкодеры
Это импульсный датчик. В процессе поворота объекта на его выходах фиксируются импульсы, количество которых прямо пропорционально углу вращения предмета. Обычно инкрементальные преобразователи применяют в процессе станкостроения с целью регистрации углового перемещения вала или в автоматизированных системах в цепи обратной связи для измерения и регистрации скорости поворота вала.
Инкрементальный энкодер — это устройство, функционирующее на основе данных импульсов, образующихся при вращении. Количество импульсов на единицу оборота – это и есть основной рабочий параметр данного устройства. Текущее значение определяется датчиком по методу подсчета количества импульсов от точки отсчета. С целью привязки систем отсчета на импульсном энкодере устанавливаются референтные метки, которые являются стартовыми после включения оборудования.
Определение данных при помощи инкрементального преобразователя возможно лишь во время вращения или поворота. При остановке вращения все данные энкодера обнуляются. В итоге при последующем включении предыдущие данные счетчика будут неизвестны. Для удобства его эксплуатации следует привести вал в исходное положение. Инкрементальный энкодер идеально справляется с задачей измерения скорости поворота.
При помощи подсчета количества импульсов от референтной метки можно с точностью определить также текущую координату угла вращения объекта.
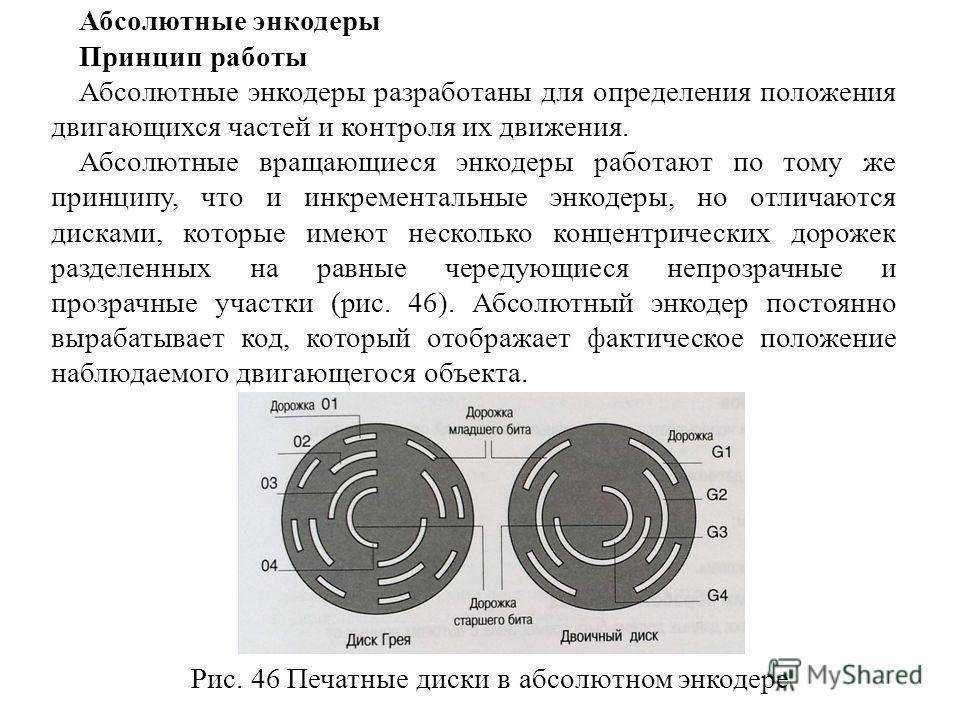
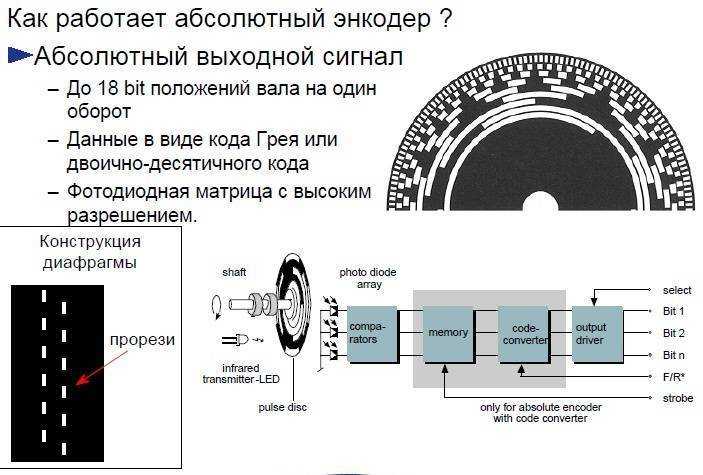
Абсолютные энкодеры
Так называют абсолютный датчик положения. Обычно в подобных энкодерах наблюдаются более сложные процессы электронной обработки сигналов и имеется оптическая схема. Но зато они выдают реквизиты объекта сразу после включения, что зачастую является обязательным для корректного функционирования системы в целом.
По сравнению с инкрементальными использование абсолютных энкодеров позволяет решать значительно более широкий круг задач, так как измерения производятся не при помощи фиксации импульсов, а специальными цифровыми кодами. Единица измерения подобного аппарата – это число уникальных цифровых кодов за единицу вращения (1 оборот).
Таким образом, абсолютный энкодер отлично справляется не только с задачей отслеживания скорости поворота (вращения) объекта, но и выдает корректные данные о его точном расположении в данный момент времени, независимо от того, подключен он или нет.
Устройство и виды энкодеров

Рисунок 1. Энкодер с ручкой — самый простой вариант Как вы уже узнали, энкодер – это поворотный датчик. Самый простой датчик оснащён ручкой, способной совершать поворот, как по стрелке часов, так и против неё. От поворотного угла и направления зависит выдаваемый цифровой сигнал, который информирует либо о том, какое положение приняла ручка, либо её стороне поворота. Обычно у таких энкодеров ручка применяется ещё в виде кнопки.
Датчики поворотного угла подразделяют по следующим критериям:
- Принцип выдачи данных: инкрементный и абсолютный;
- Принцип работы: оптический, магнитный и механический;
Преимущества и недостатки энкодеров.
К плюсам данных устройств можно отнести:
- Дешевизну и простоту в монтаже и применении.
- Минимальное количество ошибок во время подсчета импульсов, либо полное их отсутствие.
- Универсальность использования.
- Возможность определения направления вращения замеряемого объекта.
Существуют и определенные недостатки:
- Возможные ошибки при запуске системы и наличие ошибок во время работы. Особенно это будет проявляться в случае неверно выбранного типа энкодера и его монтажа.
- Наличие некоторых ограничений в плане обеспечения разрешающей способности – при повышении степени точности определения потребуется увеличивать и число рабочих каналов.
- Необходимость преобразования двоичного кода Грея в некоторых типах датчиков.
Стоит заметить, что эти и прочие недостатки с лихвой перекрываются удобством и универсальностью энкодеров.
- Любая информация, переданная Сторонами друг другу при пользовании ресурсами Сайта (http://www.techtrends.ru), является конфиденциальной информацией.
- Пользователь дает разрешение Администрации Сайта на сбор, обработку и хранение своих личных персональных данных, а также на рассылку текстовой и графической информации рекламного характера.
- Стороны обязуются соблюдать данное соглашение, регламентирующее правоотношения связанные с установлением, изменением и прекращением режима конфиденциальности в отношении личной информации Сторон и не разглашать конфиденциальную информацию третьим лицам.
- Администрация Сайта собирает два вида информации о Пользователе:
— персональную информацию, которую Пользователь сознательно раскрыл Администрации Сайта в целях пользования ресурсами Сайта; — техническую информацию, автоматически собираемую программным обеспечением Сайта во время его посещения.
Источник
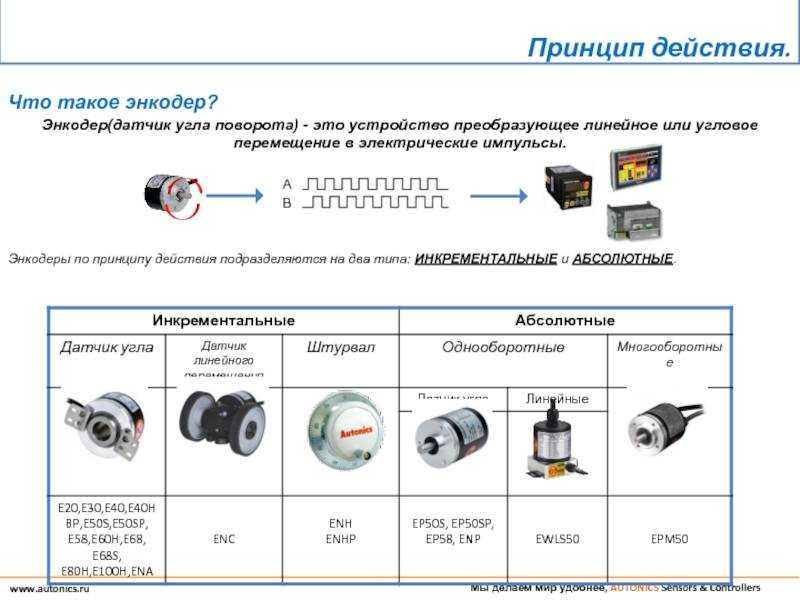
Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
Инкрементальные энкодеры
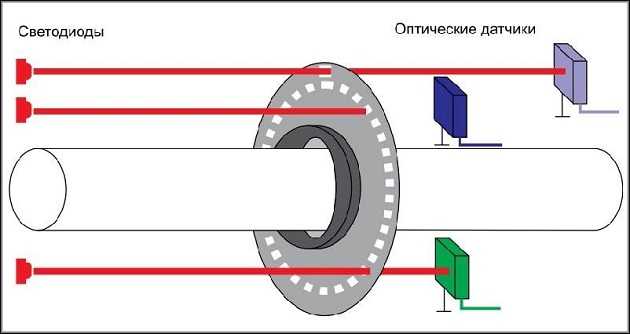
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.

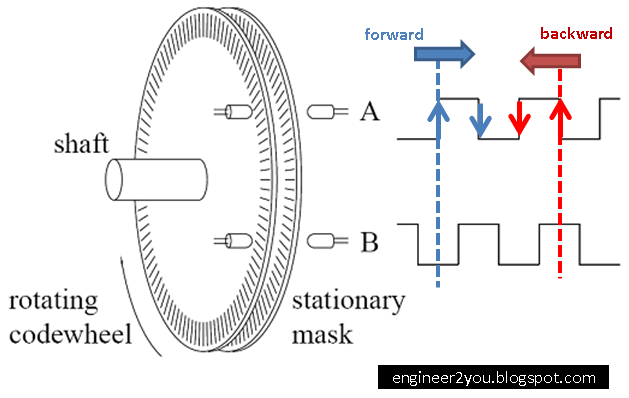
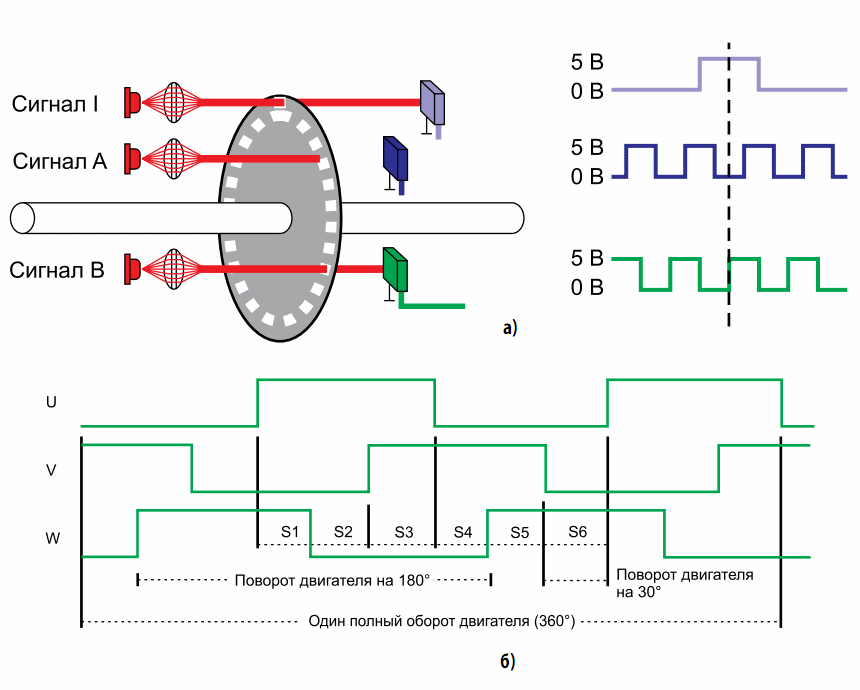
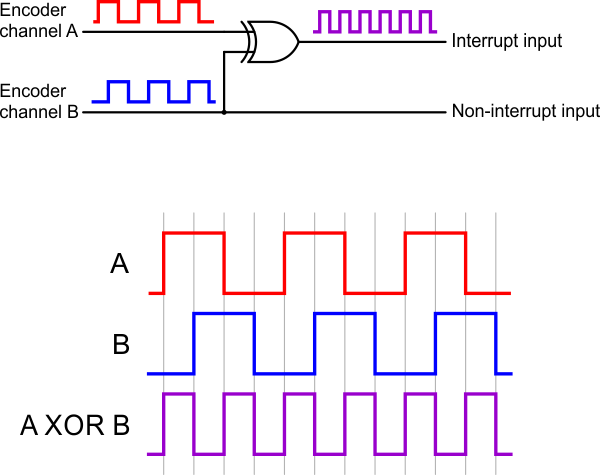
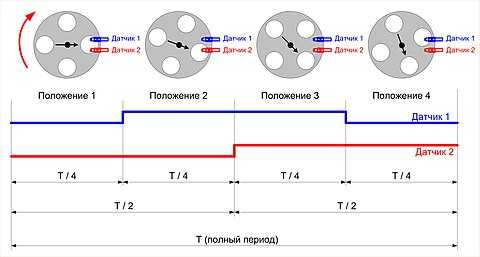
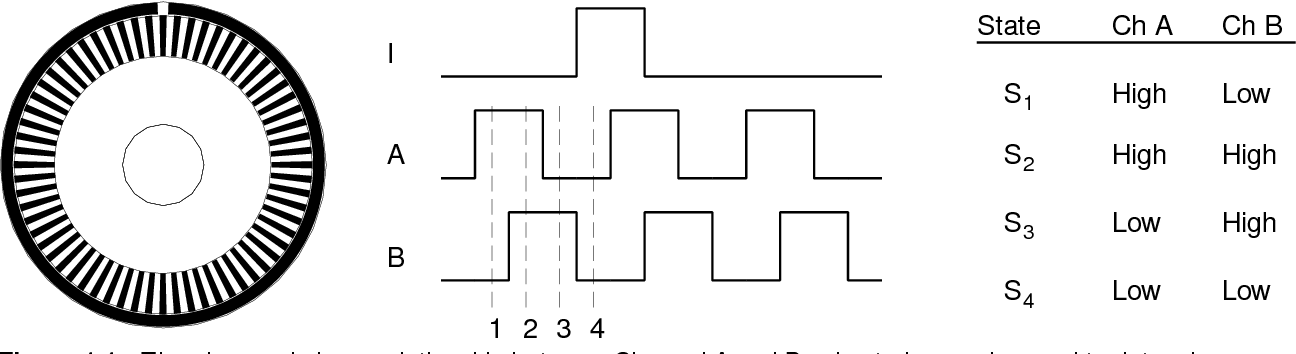
Этот вид работает следующим образом. У него есть начальная нуль-метка, или выход Z, и два дополнительных выхода — A и B. Датчик создает две линии сигналов со смещенными на четверть фазы импульсами относительно друг друга. Разница импульсов указывает на направление вращения, а их количество — на угол поворота.

Разновидность инкрементальных энкодеров — сдвоенные, или квадратурные. Они состоят из двух датчиков, которые срабатывают со смещением в полшага. Квадратурные считают количество импульсов и учитывают направление.
У инкрементальных два главных минуса. Во-первых, нужно постоянно обрабатывать и анализировать сигнал, для чего используют контроллер и специальную программу. Во-вторых, они требуют синхронизации с нулевой меткой после включения. Для этого требуется инициализация для поиска выхода Z.
Абсолютные энкодеры
Датчики такого типа устроены более сложно. Но они позволяют определить величину угла поворота сразу после включения, не требуя синхронизации с нулевой меткой.
В основе конструкции поворотный круг, разделенный на одинаковые по размеру пронумерованные секторы. После включения устройства определяется номер сектора, на котором оно находится. Такое решение позволяет сразу зафиксировать положение, угол и направление вращения.
Принцип работы абсолютного энкодера основан на использовании кода Грея для определения текущего положения и других параметров. В них не требуется синхронизация с нулевым значением.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Многооборотные датчики поворота
Абсолютные энкодеры могут быть однооборотными и многооборотными.
Однооборотные показывают абсолютное значение после одного оборота. После этого код возвращается к начальному значению. Такие датчики используют в основном для измерения угла поворота.
Если нужно измерять обороты в системах с линейным перемещением, используют многооборотные энкодеры. В них есть дополнительный передаточный механизм, благодаря чему они регистрируют, помимо угла поворота, количество оборотов.



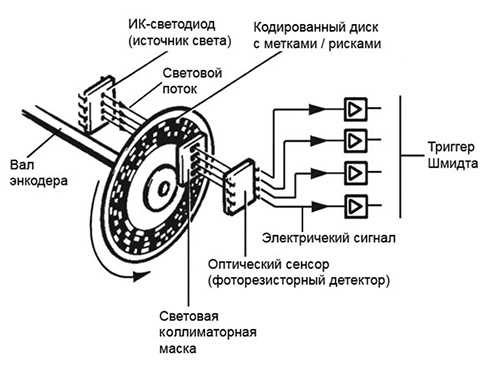
Оптические энкодеры
Диск оптического энкодера изготавливают из стекла. Отличие этого типа угловых датчиков, в наличии оптического растора, перемещающегося при вращении вала. При этом он создает поток света, который регистрирует фотодатчик.
Каждому положению энкодера соответствует определенный цифровой код, который вместе с количеством оборотов составляет единицу измерения устройства.
Оптические угловые датчики бывают фотоэлектрическими и магнитными.
В основе работающих датчиков лежит магнитный эффект Холла. Их точность и разрешение ниже, однако, и конструкция проще. Они лучше переносят сложные условия работы и занимают меньше места.
Фотоэлектрические датчики основаны на том же принципе. В них свет преобразуется в электрические сигналы.
Механические энкодеры
Также называются аналоговыми. Их диск изготавливают из диэлектрика и наносят на него выпуклые или непрозрачные области. Набор контактов и переключателей, позволяет вычислить значение абсолютного угла. Механические энкодеры также используют код Грея.
Один из недостатков этих энкодеров в том, что со временем контакты разбалтываются. В результате сигнал искажается, и прибор выдает неточные значения. А это сказывается на общей работоспособности. Оптические и магнитные энкодеры не имеют такого недостатка.
Принципы работы и устройство энкодеров
Существует два вида энкодеров по конструкции и виду выходного сигнала – инкрементальный (инкрементный) и абсолютный.
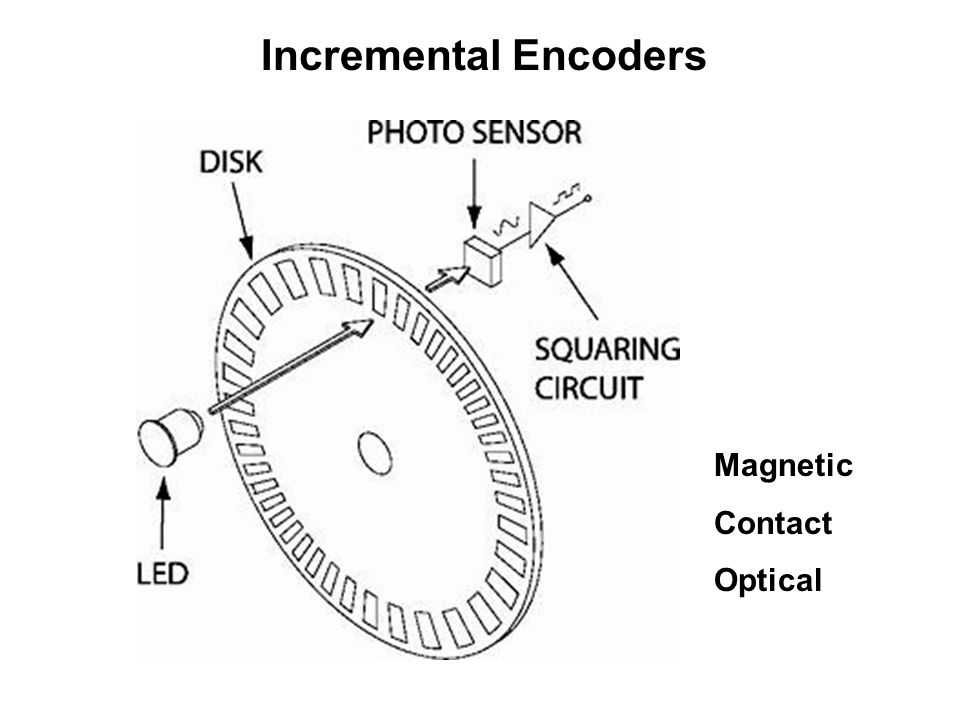
Инкрементальный энкодер устроен проще сравнению с абсолютным, и используется в большинстве случаев. Такой энкодер можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении этого диска датчик будет активироваться или деактивироваться зависимости от своего положения над прорезью. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения энкодера и его частоты вращения.
Типичный пример в цифрах – одному полному обороту энкодера соответствует 1000 дискретных изменений уровня сигнала, которые говорят об его угловом положении. В инструкции к такому энкодеру будет написано: “Разрешение – 1000 импульсов на оборот”. В более совершенных моделях на один оборот приходится 2000, 4000 и более импульсов. Бывают и программируемые энкодеры, разрешение которых пользователь может менять в очень широких пределах – например, от 1 до 65536 импульсов на оборот.
Разрешение и максимальная частота вращения обратнозависимы – ведь не может же частота выходных импульсов исчисляться гигагерцами. Обычно выходная частота ограничена значением около 500 кГц. Да и не всякий контроллер “скушает” такую частоту. Делаем вывод: энкодер с разрешением 1000 имп/оборот (наиболее распространенный) не может крутиться с частотой выше 500 Гц или 30000 об/мин. Но такие скорости в механике я лично не встречал. Делаем второй вывод: высокое разрешение не всегда хорошо.
Пример, поясняющий работу энкодера:
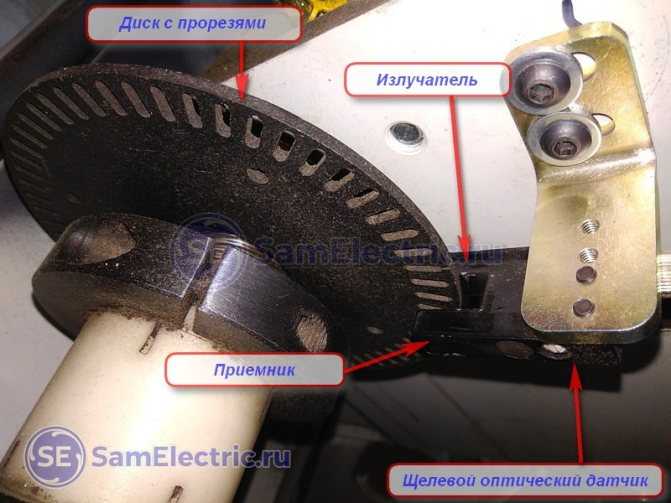
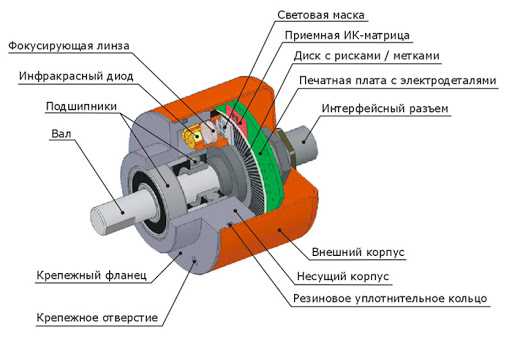
Конструкция, поясняющая работу оптического энкодера
На фото – не энкодер, но данная конструкция в первом приближении прекрасно иллюстрирует работу и устройство инкрементального оптического энкодера. Про щелевой оптический датчик я писал в статье про оптические датчики, там подробнее.
Основной минус инкрементального энкодера – необходимость непрерывной обработки его выходного сигнала. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки (что это такое – расскажу позже) либо для поиска нулевого положения механизма.
Абсолютный энкодер имеет более сложное устройство, но он позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. Говоря простыми словами, выходной сигнал у него – это параллельный код (например, 8-разрядный, имеющий 256 значений), который соответствует углу поворота. Соответствующую конфигурацию имеют и прорези в диске энкодера.
Абсолютные энкодеры работают в сложном оборудовании – там, где в любой момент времени (в том числе, в момент подачи питания) нужно знать точное положение объекта. Но сейчас, с появлением дешевых контроллеров с энергонезависимой памятью, в 99% используются инкрементальные энкодеры. Тем более учитывая, что их цена в несколько раз ниже, чем у абсолютных. Да и обрабатывать последовательные импульсы гораздо проще, чем параллельный код.
Бывают энкодеры не оптического принципа работы. Но я про них ничего рассказывать не буду, поскольку не имел с ними дела..
Что такое энкодер?
Энкодер – это электронный датчик, который механически крепится на какой-либо вращающейся детали. Обычно корпус энкодера остается неподвижным, а вращается только его вал. Это позволяет с необходимой точностью измерять разные параметры :
- скорость вращения,
- расстояние (длину),
- направление вращения,
- угловое положение по отношению к нулевой метке.
Энкодер является самым распространенным «измерительным инструментом» в современном промышленном оборудовании. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от его вращения или от угла его поворота. Этот сигнал обрабатывается в счетчике или контроллере, который выдает команды на устройство индикации или привод.

Этикетка инкрементного энкодера Sick, установленного на валу двигателя постоянного тока. Основной параметр – 1024 импульса на оборот
Энкодеру найдено множество применений, учитывая возможности последующей обработки его сигнала. Например – измерение погонной длины какого-либо материала, измерение угла открытия/закрытия задвижки, точное позиционирование деталей при перемещении и обработке. Конкретные примеры будут ниже.
Энкодеры, о которых идёт речь в статье, в некоторых источниках называются датчиками углового перемещения, датчиками угла поворота, и даже “N-кодером”.
Типы поворотных энкодеров и как они работают
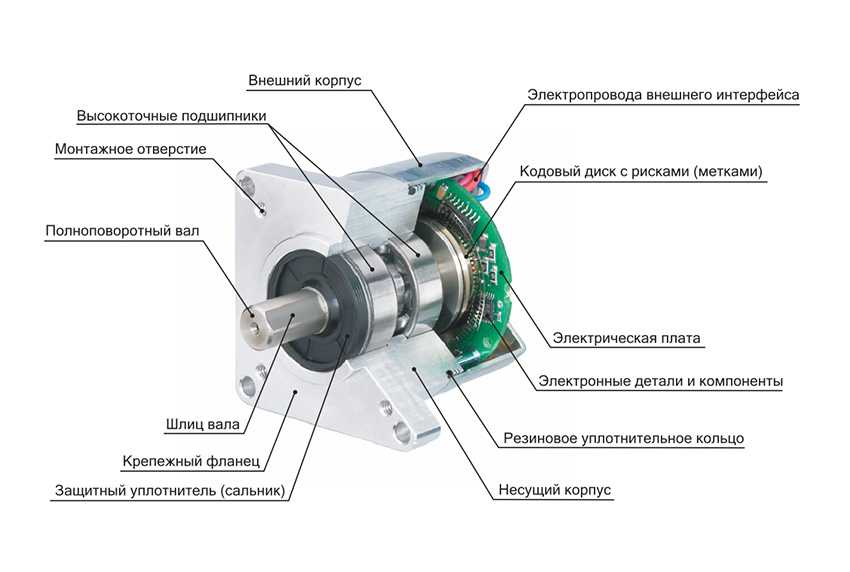
Прежде чем разбирать принцип подключения энкодера, стоит рассмотреть основные виды этих устройств и разобрать их конструкцию.
Механический поворотный энкодер
Поворотный угловой энкодер — это тот, который измеряет абсолютный угол закодированного вала, имея уникальный код для каждого положения вала. При этом каждая позиция диапазона/угла измерения, идентифицируется определенным кодом. Это означает, что отпадает необходимость в счетчиках, поскольку позиционные значения всегда доступны напрямую, даже если питание отключено.

Механический поворотный энкодер — это распространенный, недорогой вариант, который состоит из металлического диска и работает следующим образом:
- Металлический диск, расположенный на вале, используется вместе со стационарным подборщиком и вращается.
- Во время вращения, создается уникальный сигнал преобразуемый в код.
- Это означает, что каждое изменение положения фиксируется.
- Код используется для определения точного положения вала.
Приведенное выше объяснение относится к принципу работы механического датчика абсолютного вращения, но есть два других способа, с помощью которых можно обнаружить изменение положения и изменения оптических либо магнитных датчиков.
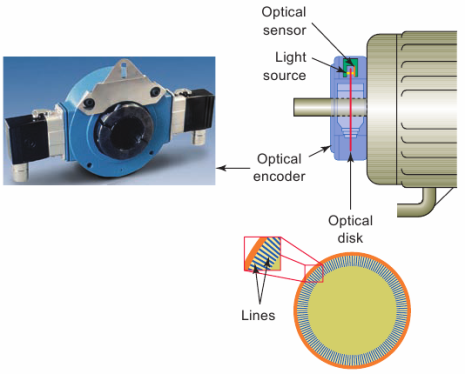
Оптические поворотные энкодеры
Оптические энкодеры состоят из диска, вала, стекла либо пластика с прозрачными и непрозрачными поверхностями, что позволяет источнику света и фотодетектору обнаруживать оптические сигналы. Такое обнаружение помогает определить позицию вала в любое время.

Процесс определения положения с помощью оптических энкодеров:
- Диск, прикрепленный к валу, вращается.
- В зависимости от положения диска, проходящий свет либо пропускается, либо блокируется.
- Полученный проходящий свет преобразуется в электрический сигнал.
- Преобразованный сигнал затем становится цифровым. Это используется для определения положения, скорости, угла и прочих параметров.
Магнитные энкодеры
Магнитные приборы состоят из серии магнитных полюсов для обозначения положения устройства и датчиков, которые обычно работают на эффекте Холла. Данное устройство имеет тот же принцип работы, что и оптические энкодеры, но вместо света, датчики обнаруживают изменение магнитных полей.

Процесс определения положения с помощью магнитных энкодеров:
- Присоединенный диск вращается.
- Магнитные датчики обнаруживают изменение магнитного поля из-за вращения.
- Такие изменения преобразуются в синусоидальные волны и преобразуются в цифровые сигналы для получения желаемого результата.
Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
- Величина импульсов, которая производится в момент одного оборота диска в процессе работы. Может варьироваться от 1 до 5 тысяч импульсов.
- Для абсолютных энкодеров важна такая характеристика, как разрядность бит или их количество.
- Тип вала, используемого в устройстве, может отличаться — он бывает с прямой осью или полый.
- Учитывается разновидность используемого фланца на валу под шпонку.
- Сигнал при выходе может отличаться.
- Уровень напряжения питания.
- Используемый тип разъема и длина кабеля.
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения. Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.



Как выбрать правильный энкодер для конкретной задачи
Выбор энкодера зависит от целей и задач проекта. Необходимо учитывать требования по точности измерения, частоте вращения и выходному коду.
Для учета угла поворота можно выбрать абсолютный энкодер, который имеет уникальный код на каждую позицию диска. Если же необходимо знать только относительное положение, можно использовать инкрементальный энкодер.
Если в задачу входит измерение скорости вращения, то следует обратить внимание на частоту измерений и определить необходимую разрядность по выходному коду. Также следует учитывать условия эксплуатации и наличие вибрации, пыли или влаги
Для надежного и безотказного работы в тяжелых условиях можно выбрать защищенный энкодер
Также следует учитывать условия эксплуатации и наличие вибрации, пыли или влаги. Для надежного и безотказного работы в тяжелых условиях можно выбрать защищенный энкодер.
- Для задач высокой точности: выберите абсолютный энкодер с высокой разрядностью.
- Для задач учета оборотов: выберите инкрементальный энкодер с определенной разрядностью по выходному коду.
- Для работы в тяжелых условиях: выберите защищенный энкодер.
Подключение поворотного энкодера с Ардуино
Теперь, когда принципы работы различных энкодеров изучены, можно приступить к описанию схемы подключения к Ардуино.
Для этого понадобятся:
- любое устройство Ардуино, например, Arduino UNO, Arduino Mega, Arduino Leonardo, Arduino 101, Arduino Due;
- любой энкодер Ардуино.
Обзор поворотного энкодера
Поворотный энкодер — это датчик, используемый для определения углового положения вала, подобный потенциометру.
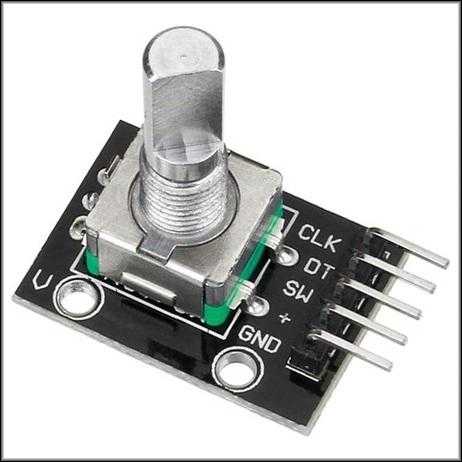
Пины, и что они означают:
- CLK: выход A (цифровой);
- DT: выход B (цифровой);
- SW: нажатие кнопки (цифровой);
- + : VCC-напряжение питания;
- GND: заземление.
Поворотный прибор может быть использован в основном для тех же целей, что и потенциометр. Однако потенциометр обычно имеет точку, за которую вал не может вращаться, в то время как энкодер может вращаться в одном направлении без ограничений. Чтобы сбросить показания положения, нужно нажать на вал вниз.
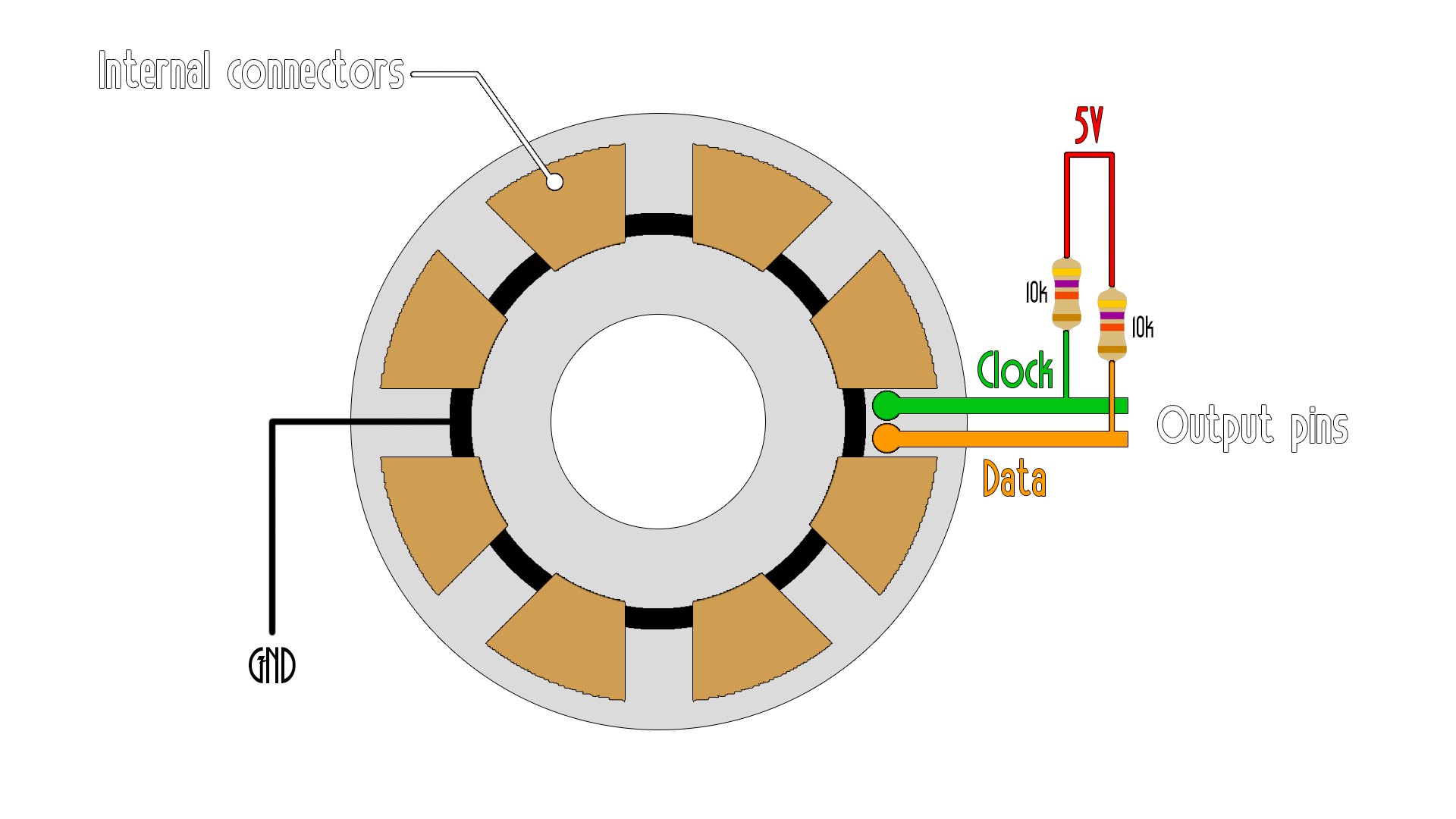
Данное устройство определяет угловое положение вращающегося вала с помощью серии прямоугольных импульсов. Он по существу имеет равномерно расположенные контактные зоны, соединенные с общим узлом, а также два дополнительных контакта, называемых A и B, которые находятся на 90 градусов вне фазы. Когда вал вращается вручную, контакты A и B синхронизируются с общим контактом и генерируют импульс. Подсчитав количество импульсов любого из этих выходов, можно определить положение вращения.
Чтобы определить направление и проверить, вращается ли штифт по часовой стрелке или против часовой стрелки, нужно сделать следующее:
- Если вращающийся вал движется по часовой стрелке, то сигнал A опережает B. В одни и те же моменты времени, A и B будут находиться на противоположных частях прямоугольной волновой функции.
- Если вал движется против часовой стрелки, то сигнал B опережает A.
Подключение
Если говорить в общем, то CLK, DT и SW, должны быть подключены к цифровым выводам на Ардуино, + должен быть подключен к 5V, а GND заземлен.
Пошаговая инструкция подключения проводов энкодера к Ардуино:
- CLK: подключите конец провода к пину CLK на поворотном энкодере, затем к любому цифровому выводу на Arduino (оранжевый провод).
- DT: подключите конец провода к пину DT, затем к любому цифровому контакту на Arduino (желтый провод).
- SW: подключите конец провода к пину SW, далее к любому цифровому контакту на Arduino (голубой провод).
- + : подключите провод к пину +, затем к контакту +5V на Arduino (красный провод).
- GND: подключите конец провода к пину GND на энкодер с контактом GND на Arduino. (Черный провод).
Как кодировать
Код изменяет высоту тона в зависимости от того, в каком направлении повернут энкодер. Когда он поворачивается против часовой стрелки, шаг уменьшается, а когда он поворачивается по часовой стрелке, шаг увеличивается.
Что понадобится:
- датчик поворотного энкодера;
- Ардуино;
- пьезодатчик;
- провода.
Вот сам код:
Описание кода
Итак, сначала нужно определить контакты, к которым подключен кодер, и назначить некоторые переменные, необходимые для работы программы. В разделе «Настройки» нужно определить два контакта в качестве входных данных, и запустить последовательную связь для печати результатов на последовательном мониторе. Также нужно прочитать начальное значение вывода A, затем поместить это значение в переменную aLastState.
Далее в разделе цикла снова изменить вывод A, но теперь поместить значение в переменную aState. Таким образом, если повернуть вал и сгенерировать импульс, эти два значения будут отличаться. Сразу после этого, используя второй параметр «if», определить направление вращения. Если выходное состояние B отличается от A, счетчик будет увеличен на единицу, в противном случае он будет уменьшен. В конце, после вывода результатов на мониторе, нужно обновить переменную aLastState с помощью переменной aState.
Это все, что нужно для этого примера. Если загрузить код, запустить монитор и начать вращать вал, значения станут отображаться на мониторе.
Упрощенный пример
Следующий пример кода продемонстрирует, как считывает сигналы Arduino на датчике энкодера. Он просто обновляет счетчик (encoder0Pos) каждый раз, когда энкодер поворачивается на один шаг, а параметры вращения отправляются на порт ПК.
Код:
Следует обратить внимание на то, что приведенный выше код не является высокопроизводительным. Он предоставлен для демонстрационных целей
Как выбрать
Датчики линейного и кругового перемещения
- Перемещение
- Круговое (угловое)
- Линейное.
- Принцип действия
- Оптические, электромагнитные, механические
- Импульсные или непрерывные
- Инкрементальные или абсолютные.
- Разрешение
- Импульсов на оборот (для круговых)
- Миллиметров, микрон (для линейных).
- Круговые датчики
- Вал
- Конструкция вала (цельный, полый)
- Диаметр
- Подшипники (если нужны).
- Вал
- Инкрементальные энкодеры
- Тип выходного сигнала
- TTL 5В (RS-422)
- HTL 8..30В
- Sin/cos 1Vss
- Sin/cos 1Vpp.
- Тип выходного сигнала
- Абсолютные энкодеры
- Тип датчика
- Однооборотные
- Многооборотные.
- Код
- Двоичный
- Грея.
- Тип выходного сигнала
- Синусно-косинусный (резольверы)
- Параллельный
- SSI
- DRIVE-CLiQ
- RS-422 (TTL)
- EnDat
- HIPERFACE
- PROFIBUS DP
- DeviceNet
- CANOpen.
- Тип датчика
- Окружающая среда
- Диапазон рабочих температур
- Степень защиты корпуса
- Класс взрывозащиты.
- Ограничения
- Максимальная рабочая скорость
- Длина кабеля.
Датчики угла наклона (инклинометры)
- Диапазон измерения угла наклона относительно вертикали (например, ±10°)
- Разрешение (0,1°)
- Абсолютная точность (±0,5°)
- Температурный дрейф (±0,5%/K)
- Температурный коэффициент (0,01°/K)
- Калибровка нуля (±5°)
- Воспроизводимость измерения (0,1% от диапазона измерения)
- Выходной сигнал:
- Токовый 4..20мА
- Напряжение 0,1..4,9В
- Напряжение питания
- Защита:
- от обрыва провода
- от обратной полярности
- Степень защиты корпуса (IP67)
- Температура окружающей среды (-30°C..+70°C)
- Подключение:
Источник
Накапливающие и абсолютные датчики угла поворота
Датчик угла поворота
Выходы «синус» и «косинус» накапливающего датчика угла поворота
Накапливающие ДУПы, на выходе формируют импульсы, по которым принимающее устройство определяет текущее положение вала путём подсчёта числа импульсов счётчиком. Сразу же после включения накапливающего ДУПа положение вала неизвестно. Для привязки системы отсчёта к началу отсчёта накапливающие датчики имеют нулевые (референтные) метки, через которые нужно пройти после включения оборудования. К недостаткам такого типа датчиков угла положения также относится то, что невозможно определить пропуск импульсов от ДУПа по каким-либо причинам. Это приводит к накоплению ошибки определения угла поворота вала до тех пор, пока не будет пройдена нуль-метка. Для определения направления вращения применяются два измерительных канала («синусный» и «косинусный»), в которых идентичные последовательности импульсов (меандр) сдвинуты на 90° относительно друг друга.
Абсолютные ДУПы выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота вала датчика угла. Датчики угла этого типа не требуют привязки системы отсчёта к какому-либо нулевому положению.
Где применяются
Устройства предлагаются в разных моделях и вариантах исполнения. Следует внимательно подходить к выбору энкодеров. К примеру, если он работает на благо пищепрома, то следует использовать только те разновидности, которые соответствуют нормам гигиены. Как правило, они выполнены из нержавеющих материалов.
В области печатного и текстильного производства датчики обычно дополняют аппаратами для обрабатывания данных.
Инкрементные энкодеры устанавливаются на транспортерах, предназначенных для перемещения древесных заготовок.
Если требуется использовать энкодер при металлообработке, то прибор следует оснастить специализированной защитой от вибрационных воздействий, а также от повышенных температур и попадания внутрь механизма частичек влаги и пыли. На электрические моторы устанавливаются особые виды энкодеров, способных замерять скорости оборотов шпинделя, положение оси и ее продвижение.
Если речь идет о системе автоматизации на производствах, то используются мини-энкодеры диаметром не более 2,5 см и имеющие различные диапазоны напряжений на выходах.
Лифтовые устройства работают на приспособлениях диаметром 4,4 см. Часто их монтируют прямо на лебедках для того, чтобы снизить воздействие на них механического характера.


В медицинском оборудовании датчики-энкодеры применяются в ЭМРТ. Они предназначены для исключения воздействия магнитного поля. Корпус в этом случае изготавливают из непроводящего материала.
В телекоммуникационной сфере энкодеры используются для определения расположения и направленности антенны. Иногда нужно применять датчики для работы в жестких условиях.
Находят свое применение энкодирующие аппараты и в области альтернативной энергетики. К примеру, они устанавливаются на программируемых датчиках, используемых в солнечной ферме. Датчики изготавливаются из специализированных материалов, которые надежно защищены от попадания влаги и ультрафиолета.
Крайне распространены сегодня электромеханические энкодеры, преобразующие вращательные движения в аналоговые или цифровые форматы распространения информации. Они довольно схожи с потенциометрами, однако могут постоянно осуществлять вращение как в направлении часовой стрелки, так и в обратную сторону.
Поворотные энкодеры различаются по нескольким типам. Как уже отмечалось, это абсолютные и инкрементальные – они же относительные. Первому типу выдают значения, которые пропорциональны настоящему углу расположения вала. Второй тип выдает как шаг передвижения валов, так и их направленность. Благодаря этому, именно энкодирующее оборудование поворотного типа получает все большее распространение в различных сферах бытовой электротехники. Главным образом, это конструирование всевозможных управляющих ручек. Часто такие устройства могут заменить потенциометр или кнопки для осуществления навигации.
Если необходимо выполнить быструю навигацию и настройку, либо оперативное введение данных и выбора пунктов меню, то энкодеры также придут на помощь.
Определенные модели имеют специальные кнопки, создающие дополнительные входы для процессоров, которые могут применяться как другие пользовательские команды в организации управленческого интерфейса.
Абсолютные энкодеры: принцип работы и применение
Принцип работы абсолютных энкодеров
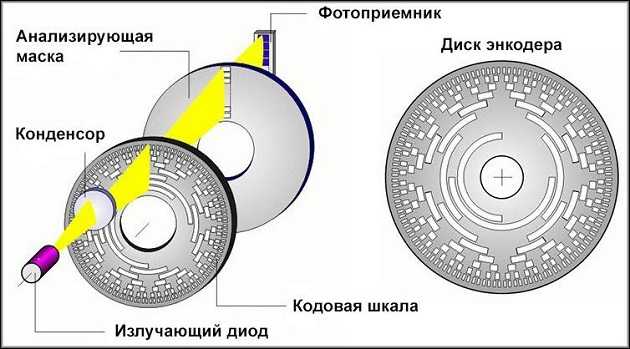
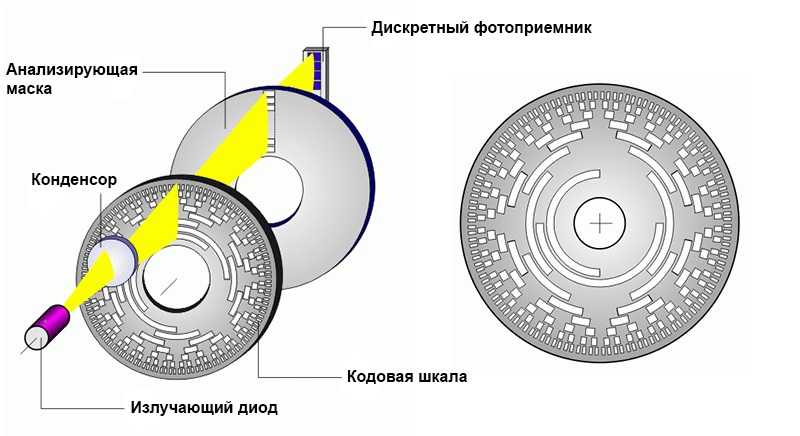
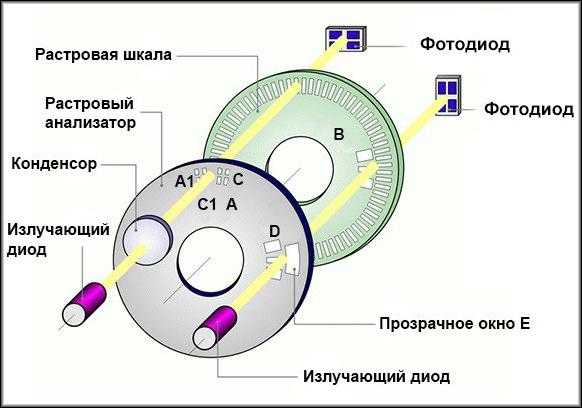
Абсолютный энкодер — это устройство, которое не только измеряет количество оборотов, но и определяет точное положение вращения в определенный момент времени. Он работает по принципу оптического измерения, используя светочувствительные элементы (фоторезисторы) и штриховые или кольцевые диски.
Каждый диск имеет уникальный узор, на который падает свет и создает шаблон для распознавания положения. Когда диск вращается, фоторезисторы считывают изменения световой интенсивности узора и передают сигнал на декодер, который определяет точное положение диска.
Применение абсолютных энкодеров
Абсолютные энкодеры находят применение в различных областях, где необходимо точно определить положения и движения объектов. Они часто используются в приводных системах CNC-станков, роботизированных системах, медицинском оборудовании, а также в системах контроля движения при производстве и техническом обслуживании оборудования.
Абсолютные энкодеры также широко применяются в автомобильной промышленности, в силовых двигателях и прецизионных экспериментах. Они являются надежными, точными и долговечными устройствами, которые могут обеспечивать высокую степень точности и контроля в различных условиях эксплуатации.
Особенности настроек и подключения
Монтажом энкодеров должен заниматься только профессиональный мастер. Они монтируются обычно на том валу, с которого считывается информация. Применяются переходные муфты для компенсации различия размеров. Корпус энкодера необходимо как можно более прочно закрепить.
Если же речь идет о монтажных работах на полом валу, то требуется прибегнуть к иному методу. В этом случае вал включается внутри датчика и монтируется внутри полой втулки. При этом сам корпус считывающего устройства закреплять не следует.
Если брать самый элементарный случай подключения, то, по возможности, следует подключить выход преобразователя к входу счетного устройства, и запрограммировать его на определенные параметры скорости.
В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Магнитные энкодеры
Принцип магнитных измерений
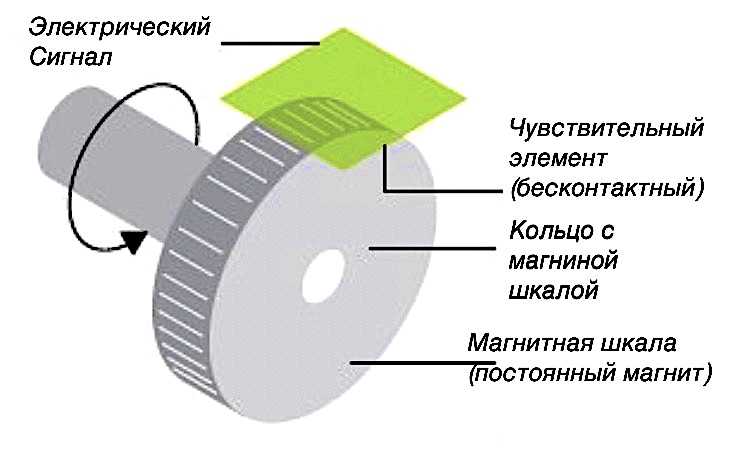
Магнитные энкодеры определяют угловое положение с использованием магнитно-полевой технологии. Постоянный магнит,установленный на валу энкодера, создает магнитное поле, которое измеряется датчиком, формирующим уникальное значение абсолютного положения.
Инновационная многооборотная технология
Многооборотные магнитные энкодеры IXARC POSITAL используют инновационную технологию для отслеживания количества оборотов, даже если оборот произошел при отключенном питании системы. Для выполнения этой задачи энкодеры преобразуют вращение вала в электрическую энергию. Технология основана на эффекте Виганда: когда постоянный магнит на валу энкодера поворачивается на определенный угол, магнитная полярность в „проводе Виганда“ резко меняется, создавая кратковременный всплеск напряжения в обмотке, окружающей провод. Этот импульс отмечает поворот вала, а также обеспечивает питание электронной цепи, регистрирующей данное событие. Эффект Виганда происходит в любых условиях, даже при очень медленном вращении, и исключает потребность в резервных батареях.
Преимущества магнитных энкодеров
Магнитные энкодеры являются надежными, долговечными и компактными. Конструкция, не требующая использования батарей и не имеющая зубчатых передач, обеспечивает механическую простоту и более низкую стоимость по сравнению с оптическими энкодерами. Их компактные габариты позволяют использовать их в очень ограниченном пространстве.
Энкодер вращения — оптический или магнитный?
Этот вопрос однажды задали соучредителю группы компаний «Fraba» (он же директор компании Posital) в интервью журнала «Конструктор» при обсуждении темы внедрения новой магнитной технологии при производстве энкодеров вращения. Ниже перевод публикации этого интервью.